新しい,嬉しい,楽しい.そんなロボットを作ろう!
清水研モットー
新しい発想で,使う人が嬉しくなるものをつくる.更に楽しんで使ってもらえれば素晴らしい.
清水研究室では,ロボットを題材に,新しい,嬉しい,楽しいものづくりを行っています.
空気圧駆動4足ロボット,壁面移動ロボット,凹凸物把持グリッパ,エンジン駆動小型コンプレッサなどを開発しています.
- 四足歩行ロボット
- ロボット内蔵用小型コンプレッサ
- 片麻痺患者用歩行器
- 万能真空吸着グリッパ(UVG)
- UVGの特性解析
- UVGを用いた壁のぼりロボット
- UVGを用いた検査用マルチコプタ
- UVGを用いた壁のぼりアシストスーツ
万能真空吸着グリッパ(UVG)
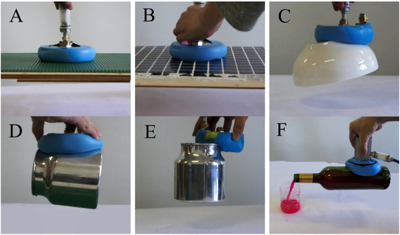
UVGは粉体の密度に応じて,その振舞が流体的または固体的に変化するジャミング転移に基づくUniversal Gripper(以降UGとする)を利用した研究である.UGを吸盤のスカート部に用いることで,ゴム製のスカートを持つ従来の真空吸盤と比較して,柔軟性のあるスカートが凹凸面に合わせて変形するため,気密性を確保しやすい.またUGで把持する事が困難であった,平面形状と重量物を,UVGは把持する事が可能である.
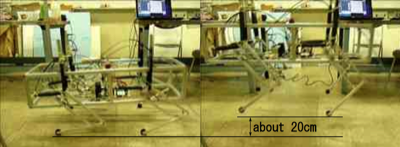
UVGを用いた壁のぼりロボット
橋梁などの維持管理および災害状況調査などの災害対応といった,インフラブロジェクトにおけるロボットの活躍が期待されている.高所の検査や倒壊ビル内の探索などをロボットで行うためには,検査機器を搭載した上で,壁面や天井に吸着する技術が必要となる.またインフラはH鋼やコンクリートなどの複合材で構成され,その外面はガラスなどの平面やタイル面などの凹凸面である.そのため,材質を問わず傷つけずに凹凸面に吸着する技術が望まれる.
Toshihiko Shimizu Web