神戸高専ロボフェス2016のご案内
![]()
神戸高専では,平成29年度4月より「(仮称)新たな教育プログラム(ロボット分野)」を導入する予定です。そこで、ロボットについて皆さんに少しでも理解していただくために、下記のように、高専祭に合わせて、神戸高専ロボフェス2016を開催することになりました。様々なロボットの展示や実演、競技などが実施されますので、ぜひご来場ください。
- 日時:
- 2016年10月29日(土), 30日(日) 10:00〜16:00 (※ロボカップサッカーは30日のみの実施です。)
- 場所:
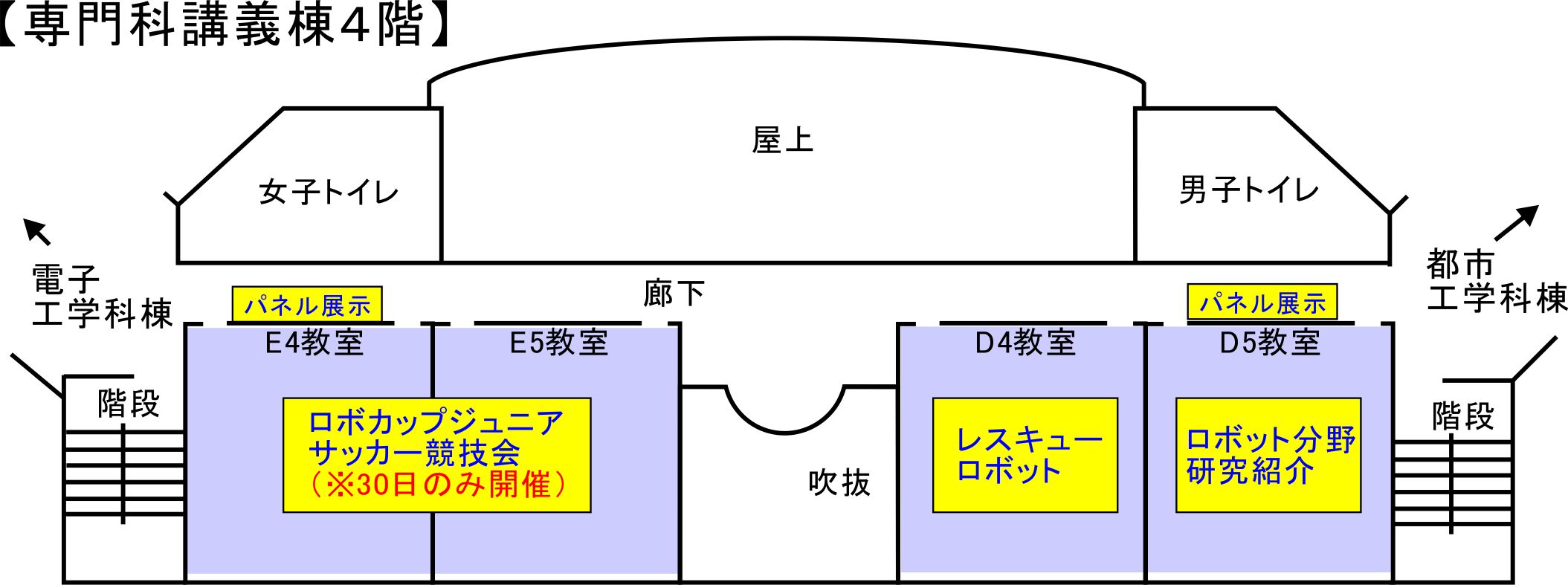
- 専門科講義棟4階 ・ E4, E5, D4, D5教室 (下図参照)
-
- 展示内容:
- 【廊下】パネル展示
- 「(仮称)新たな教育プログラム(ロボット分野)」の概要についてパネル展示しています。
- 【E4,E5教室】 ロボカップジュニアサッカーロボット競技会 (協賛: 阪神ロボカップジュニア協議会 )
-
ロボカップとは、「西暦2050年までに、人間のサッカー世界チャンピオンチームに勝てるロボットチームを作る!」という、夢のある目標を掲げ、人間社会に役立つロボット技術を育成することを目的とした、国際プロジェクトです。ロボカップジュニアサッカーは、自立型ロボットを使って2対2のサッカー競技を行います。使用できるロボットはオープンリーグの場合、直径22cm、高さ22cm以内で重さ2.4kg、使用電圧15V以下です。ボールは赤外線が放出される電子ボールを使用します。試合は前半・後半で行われ、得点の多いチームが勝ちです。各種センサーの情報をもとに、現状を把握し、ロボット自身の判断でシュートを打ったり、ゴールを守ったりする自立型ロボットです。
神戸高専ロボフェス2016では、ロボカップジュニアジャパン阪神ブロックに所属する高校および本校電気工学実験部のサッカーロボットによる競技会(試合)を実施します。
(競技会の詳細はこちら)
- 【D4教室】 レスキューロボット
-
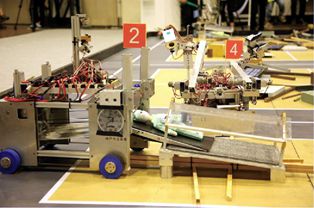
レスコンは、レスキューを題材とした図に示すように大地震が都市で災害が発生した状況を模擬した1/6スケールの実験フィールド(約9m×9m)内にて、ロボットに搭載したカメラ等のセンサ情報を頼りに無線遠隔操縦により、被救助者を発見、救助、搬送を行うロボットコンテストです。その特徴は、通常のロボコンと違い、単にロボットを対戦させ、その強さを競い合うものではなく、救助の戦略や方法やすばやさ、特にその救助の質、つまり被救助者に対するダメージを抑え、やさしく扱えるか、を評価する形となっており、自チームのレスキュー活動のポイントで競い、各チームはベストな救助を探求目指すものです。このために製作するロボットに対する制限が少なく、ロボットベースに収まれば,何台でも出場させることは可能であり、できるだけ自由な発想を促しています。
神戸高専では毎年、10〜20人程の学生が、「がんばろうKOBE」で活動しています。まずコンテストに対する取り組みとしては、夏の大会が終わるとすぐに、次年度に向け救助システムそのものの戦略を立て、新しいロボットのアイデア出しから始まり、ロボット製作のための設計をしながら1〜2月のレスコン応募書類作成や審査を経て、2月から本格的に図に示すようなロボットを通常は4台程度新規に製作開始、6月の予選、8月の本選へと改良・調整を重ねていきます。「がんばろうKOBE」のロボットの特徴は、車体形状としては、クローラ型を主に車輪型が多く、H27年度はドローン型まで開発しました。また、被救助者にダメージを与えない工夫を重ねています。

- 【D5教室】 ロボット関連研究紹介
-
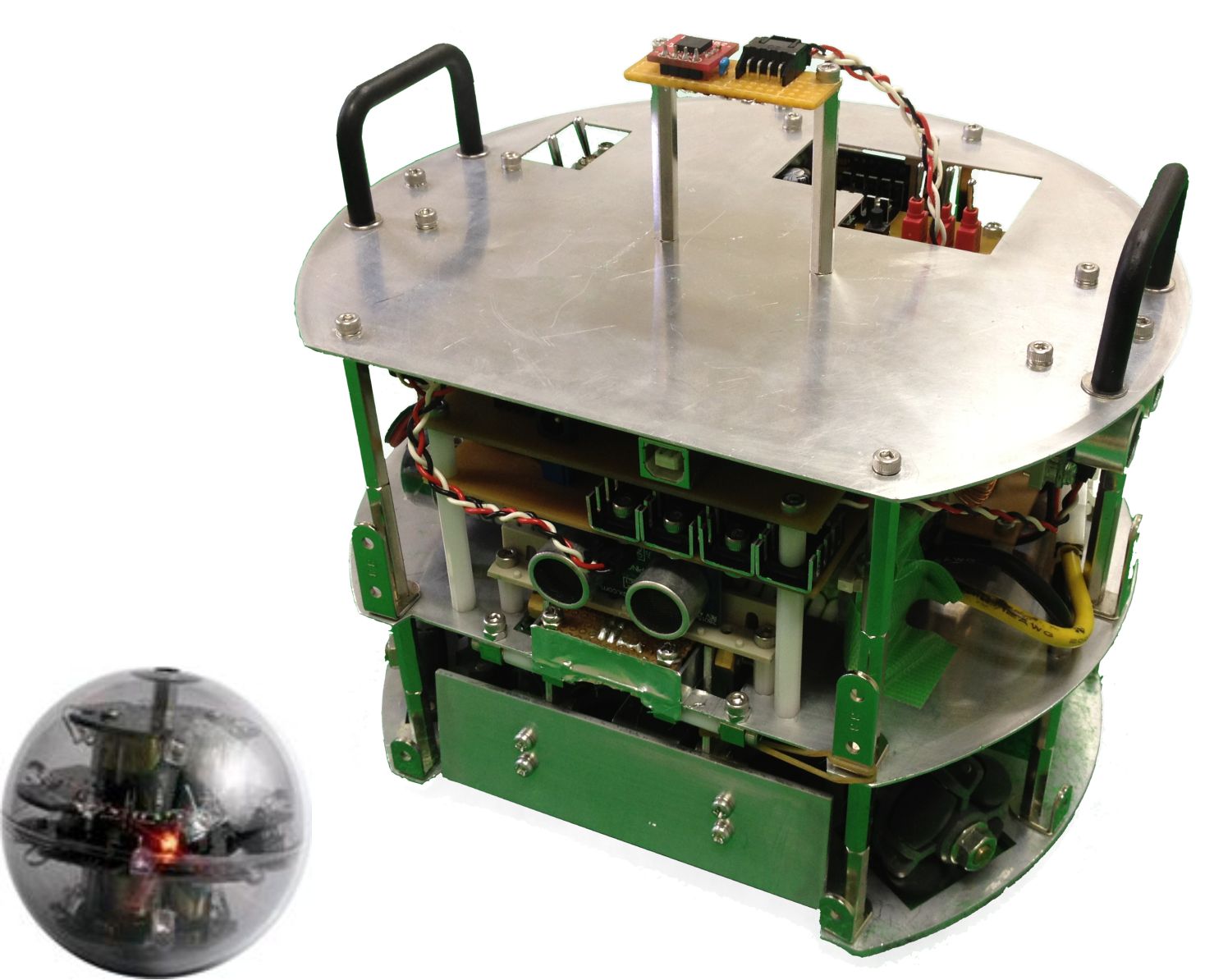
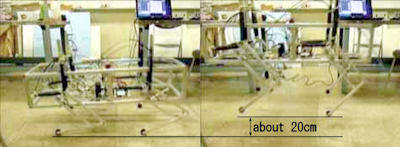
■四足歩行ロボット 震災や原発事故等の災害現場において、長期間救助活動を行える自律移動ロボットが必 要とされています。倒壊した戸立住宅における被災者探索や、半壊したビル内の偵察を行 うためには、次の要件が挙げられます。内蔵動力源による単独駆動、歩行や跳躍による不整 地移動性能、倒壊を促進しない小型軽量であることなどです。本研究では空気圧ロ ボットに注目しました。空気圧駆動ロボットは、電動、油圧駆動ロボットと比較して、空気 の圧縮性によって外界との接触を扱いやすいという特徴を有しています。しかし、従来研究 におけるロボットは、100kgを超える大型高重量の外部コンプレッサが必要であり、単独 駆動が困難でした。そこで本研究では、エンジン駆動による小型高出力コンプレッサを 搭載した空気圧駆動ロボットの開発を進めています。
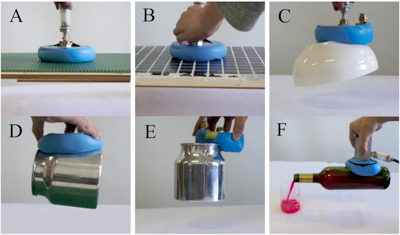
■万能真空吸着グリッパ(UVG) 万能真空吸着グリッパ(Universal Vacuum Gripper, 以降UVGとする)は、図に示すよ うに、凹凸を有する平面に吸着できる真空吸盤です。タイル面、食器、テーパ缶、ワイ ンボトルなどに吸着することができます。
UVGは粉体の密度に応じて、その振舞が流体的または固体的に変化するジャミング転移 に基づくUniversal Gripper (以降UGとする) を利用した研究です。UGを吸盤のスカート 部に用いることで、ゴム製のスカートを持つ従来の真空吸盤と比較して、柔軟性のある スカートが凹凸面に合わせて変形するため、気密性を確保しやすい。またUGで把持する事 が困難であった、平面形状と重量物を、UVGは把持する事が可能です。